on
如何在Ultra96v2上整合DPU及安裝DNNDK
前言
此篇將快術帶領各位如何在Ultra96 v2上整合DPU IP及安裝DNNDK,並佈署一個Resnet50的分類網路及人臉偵測的Densebox檢測網路
環境需求
以下為使用Xilinx DPU IP加速深度學習演算法所需的軟體及硬體工具
軟體工具
- Vivado® Design suite 2019.1
- 已安裝好Ultra96 v2的Board files (安裝說明)
- Xilinx SDK 2019.1
- Petalinux 2019.1
硬體工具
- Ultra96 v2 board
- 12V@4A 電源供應器
- MicroUSB to USB-A cable
- AES-ACC-USB-JTAG board
- SD card(FAT32格式)
- DisplayPort 螢幕(選項)
- Mini-DisplayPort to DisplayPort cable(選項)
- USB Webcam(選項)
首先從我的Github下載本地,如下所示
git clone https://github.com/xelalin/Ultra96v2-DPU.git
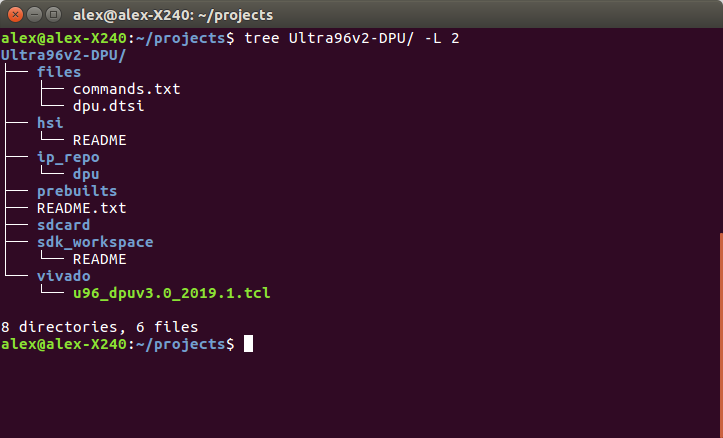
目錄說明:
- files: petalinux/Yocto recipes, and source code for SDK, etc.
- hsi: 存放Vivado Design Suite export出的HDF檔案,給Petalinux使用
- prebuilts: 存放pre-build的
.hdf,BOOT.BIN,image.ub以及application的.elf - sdk_workspace: 空目錄用來來指定SDK的workspace
- vivado: Vivado Design suite工作目錄,內含
u96_dpuv2.0_2018.2.tcl用來產生Vivado Block Design - sdcard: 用來存放SD Image,但因超過Github的限制,所以是空的
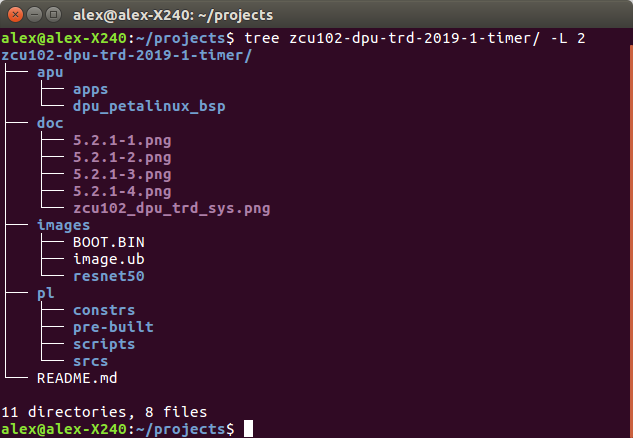
另外從Xilinx官網下載DPU TRD並且解壓縮後的目錄結構,如下
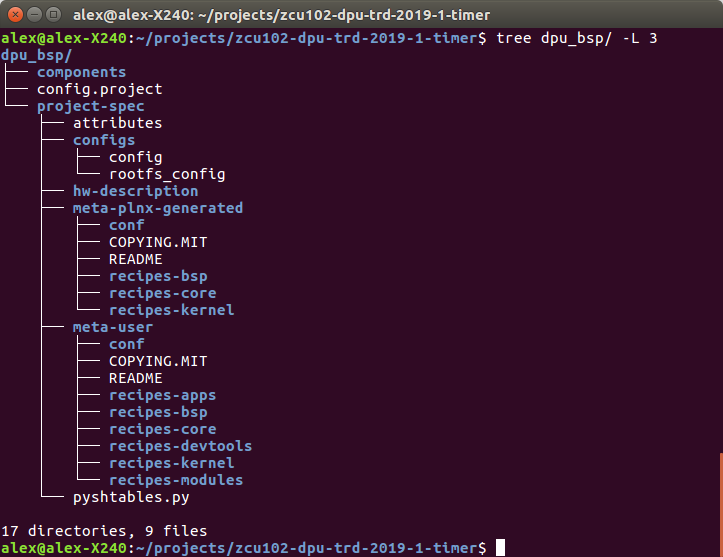
透過TRD BSP建立一個petalinux project得到相關的Yocto recipes,以利後續的開發流程
source /opt/pkg/petalinux/2019.1/settings.sh
cd zcu102-dpu-trd-2019-1-timer
petalinux-create -t project -n dpu_bsp -s ./apu/dpu_petalinux_bsp/xilinx-dpu-trd-zcu102-v2019.1.bsp
tree dpu_bsp/ -L 3
將以下相對應的檔案及目錄,複製到Ultra96v2-DPU目錄下
cp -rp ./zcu102-dpu-trd-2019-1-timer/pl/srcs/dpu_ip/dpu ./Ultra96v2-DPU/ip_repo/
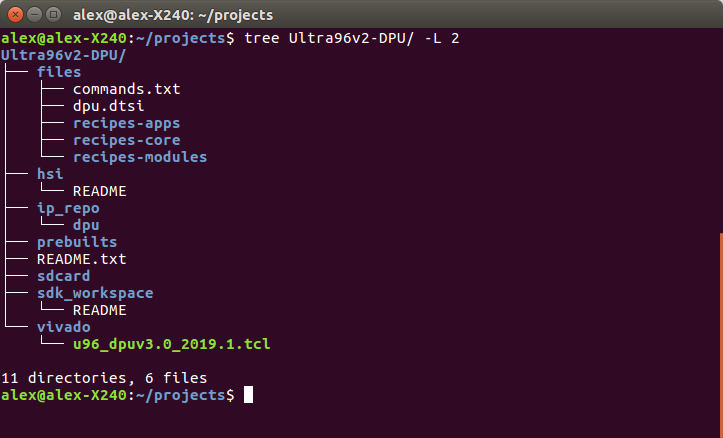
將Yocto相對應recipes複製到files目錄下:
cp -rp zcu102-dpu-trd-2019-1-timer/dpu_bsp/project-spec/meta-user/recipes-apps/ Ultra96v2-DPU/files/
cp -rp zcu102-dpu-trd-2019-1-timer/dpu_bsp/project-spec/meta-user/recipes-core/ Ultra96v2-DPU/files/
cp -rp zcu102-dpu-trd-2019-1-timer/dpu_bsp/project-spec/meta-user/recipes-modules/ Ultra96v2-DPU/files/
完成後,目錄結構如下:
Projectg說明
簡單用一張圖示說明設計流程:

從上圖得知,完成佈署一個深度網路神經系統包含以下四個開發步驟:
- Vivado Design Suite: 透過Vivado IPI整合DPU IP到FPGA上
- PetaLinux: 建立一個Linux得執行環境,並且整合DPU的driver,runtime以及utilities
- Xilinx DNNDK: 將caffe或是Tensorflow的模型,編譯成DPU的可執行檔.elf
- Xilinx SDK: 編譯出一個Linux環境的可執行檔.elf
Vivado Design Suite的步驟
- 建立一個Ultra96 v2 board的new project
- 加入DPU IP到此Project中
- 在IP Integrator中,使用
.tcl script建立Block Design - 解釋DPU的配置及連接
- 產生bitstream
- Export一個
.hdffile
Petalinux的步驟
- 使用”Template Flow.”建立一個Petalinux new project
- 加入Yocto Recipes以及更改recipe
- Import
.hdf - 在Petalinux中配置Ultra96 v2 規格硬體
- 在root filesystem中加入必要的packages
- 在device-tree中加入DPU的配置
- build project
- Create a boot image
Xilinx DNNDK
下圖為DNNDK的開發流程圖,此文直接使用已經經過dnnc compiler出的.elf files,筆者將在另一篇文章詳細說明,如何從以訓練好的模型透過DNNDK產生DPU可執行的.elf檔,如以下圖是所示:

Xilinx SDK
- 建立resent50和face detection的應用程式
- Import由
dnnc所產生出的.elfs - 更新sysroot上application的選項,包含必要的librries…etc
- 產生 resnet50和face detection的應用程式
在Vivado Design suite上建立一個硬體平台
Step 1: 在Vivado® Design Suite建立一個新的Project
- 呼叫Vivado
cd <PROJ ROOT>/vivado/
vivado
-
利用Ultra96 v2 board files建立新project
- Project Name: project_1
- Project Location:
<PROJ ROOT>/vivado - Do not specify sources
- Select Ultra96v2 Evaluation Platform
注意: 如在Boards tab中選不到Ultra96v2 Evaluation Platform,那麼請先參考Installing Board Definition for Ultra96v2 先將Board files安裝好

- Click Finish.
Step 2: 加入DPU IP repository
-
在Project Manager點擊IP Catalog
-
在Vivado Repository典籍滑鼠右鍵然後選擇Add Repository.
-
瀏覽目錄點選到**
/ip_repo**

Step 3: 建立Block Design
-
打開TCL Console tab,確認工作目錄為
<PROJ ROOT>/vivado輸入以下命令source u96_dpuv2.0_2018.2.tcl
- 當Block Design完成後,在source tab的 design_1 上按滑鼠右鍵選擇Create HDL Wrapper
- 同意Default的選項

- 驗證設計

Step 4: 複製 pre-built .hdf 到 hsi目錄下
為了節省時間,我們可以跳過產生bitstream的步驟,手動將pre-built的..hdf文件導出到hsi的目錄中。 要使用pre-built的選項,請執行以下命令將pre-bulit.hdf複製到hsi中:
cd <PROJ ROOT>
cp prebuilts/design_1_wrapper.hdf hsi
完成此步驟後,你可以直接跳到Petalinux的部份
Step 5: 產生bitstram
- 點擊 Generate Bitstream

- 接受預設選項
Step 6: Export Hardward
當Bitstream成功的生成後,請執行以下步驟來export .hdf以供PetaLinux使用:
-
點擊 File > Export > Export Hardware.
-
確認Export有勾選 “include the bitstream”
-
Export the hardware platform to
<PROJ ROOT>/hsi. -
點擊 OK.

在Petalinux下,產生Linux Platform
從Viviado® Design Suite export出的硬體定義文件(.hdf),就可以開始Petalinux設計流程了。此時,你應該已經把.hdfexport到<PROJ ROOT>/hsi目錄了
Tip: 為了加快輸入速度,我以將相關命令列指令放在<PROJ ROOT>/files/commands.txt,你可以是用複製和貼上,一步一步的執行。
Step 1: 建立一個PetaLinux的Project
利用以下命令創建一個Petalinux的project,從Zynq® UltraScale+樣板開始,並不是使用一個以存在的BSP,並且專案檔名為petalinux
source /opt/xilinx/petalinux/2018.2/settings.sh
cd <PROJ ROOT>
petalinux-create -t project -n petalinux --template zynqMP
cd petalinux
Step 2: 複製Yocto recipes到PetaLinux的專案
這個步驟,主要是將Yocto recipes加入到客製化的Kernel中以及加入dnndk相關檔案。
注意: 在執行以下命令前,確認是否位於 <PROJ ROOT>/petalinux的目錄中。
- 加入DPU utilities, libraries, and header files到root file system.
cp -rp ../files/recipes-apps/dnndk/ project-spec/meta-user/recipes-apps/
- 加入DPU driver kernel module.
cp -rp ../files/recipes-modules project-spec/meta-user
- 加入一個Linux啟動時可自動運行的scripts.
cp -rp ../files/recipes-apps/autostart project-spec/meta-user/recipes-apps/
- 加入一個“ bbappend”,以便執行各種操作,例如自動插入DPU Driver,自動掛載SD卡,修改PATH等
cp -rp ../files/recipes-core/base-files/ project-spec/meta-user/recipes-core/
Step 3: 將PetaLinux配置為安裝dnndk文件
編輯/petalinux-image-full.bbappend檔案
vi project-spec/meta-user/recipes-core/images/petalinux-image-full.bbappend
加入以下這三行到petalinux-image-full.bbappend:
IMAGE_INSTALL_append = " dnndk"
IMAGE_INSTALL_append = " autostart"
IMAGE_INSTALL_append = " dpu"
Step 3: 將PetaLinux指向從Vivado Design Suite導出的.hdf文件
- 使用以下命令打開PetaLinux項目配置的GUI:
petalinux-config --get-hw-description=../hsi
- 將 serial port設成
psu_uart_1.
Subsystem AUTO Hardware Settings->Serial Settings->Primary stdin/stdout = psu_uart1
注意: Ultra96 v2 board的UART連接到USB JTAG/UART板子為psu_uart_1.

- 選擇 Ultra96 Machine.
DTG Settings -> MACHINE_NAME = zcu100-revc
注意: Ultra96原來叫名為zcu100.
Tip: 使用倒退鍵刪除預設文字, 然後再加入zcu100-revc.
這樣.系統就會使用Ultra96指定的device-tree檔案.

- 跳出及儲存.這個步驟會需要一點時間建立.
Step 5: 配置rootfs
使用以下命令打開PetaLinux rootfs配置的GUI.
petalinux-config -c rootfs
-
Enable 以下列出的項目:
Note: 不要 enable dev跟dbg packages.
Petalinux Package Groups ->
- matchbox
- opencv
- v4lutils
- x11
Apps ->
- autostart
Filesystem Packages ->
- libs->libmali-xlnx->libmali-xlnx
Modules ->
- dpu
User Packages ->
- dnndk

- 退出及儲存.
Step 6: 配置Kernel
使用以下命令打開PetaLinux kernel配置的GUI
petalinux-config -c kernel
- 退出及儲存.
Step 7: 在device tree中加入DPU
petalinux 2019.1 device-tree generator還位支持DPU。因此,我們需要根據我們的硬體配置,手動將DPU加入到device-tree node
在project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi最後一行,加入以下的文字

Interrupt數值
| PS Interface | GIC IRQ# | Linux IRQ |
|---|---|---|
| PL_PS_IRQ1[7:0] | 143:136 | 111:104 |
| PL_PS_IRQ0[7:0] | 128:121 | 96:89 |
要計算中斷號(即Linux IRQ,請從GIC IRQ號中減去32。例如,在Vivado項目中,我們連接到GIC IRQ編號為121(根據TRM)的“PL_PS_IRQ0 [0]”。 因此,Linux IRQ號為121-32 = 89(0x59)。
Interrupt的三種定義如下:
| Interrupt | Description |
| 1st Cell | 0 = Shared Peripheral Interrupt (SPI) 1 = Processor to Processor Interrupt (PPI) |
| 2nd Cell | Linux Interrupt number |
| 3rd Cell | 1 = rising edge 2 = falling edge 4 = level high 8 = level low |
Step 8: 產生kernel和root file system
petalinux-build
Step 9: 建立boot image
cd images/linux
petalinux-package --boot --fsbl zynqmp_fsbl.elf --u-boot u-boot.elf /
--pmufw pmufw.elf --fpga system.bit --force
Step 10: 產生sysroot
在XSDK中編譯一個應用程式,需要指定sysroot來針對root file system中,所使用的一些軟件包所提供的libraries/header來產生執行檔
安裝Pre-Built SDK
完成整個XSDK所需的sysroot編譯時間需要幾個小時,因此,提供一個已pre-built SDK以節省時間
這個pre-built SDK從這裡下載後,解壓縮然後複製sdk.sh到../files
使用以下命令安裝pre-built sdk
cd <PROJ ROOT>/petalinux
petalinux-package --sysroot -s ../files/sdk.sh
重新建立SDK
如果想要完成整個過程以重新建立SDK,請使用以下步驟:
- 執行以下命令以創建 Yocto SDK以及複製到
<PROJ ROOT>/petalinux/images/linux/sdk.sh:
petalinux-build --sdk
- 執行以下命令解壓縮以及安裝所產生的SDK跟sysroot到指定的目錄:
petalinux-package --sysroot -d <directory>
Note: 如果你沒有指定目錄(-d), 預設會將SDK安裝在images/linux/sdk

使用Xilinx SDK產生Machine Learning的應用程式
依照以下步驟,使用Xilinx SDK來建立兩個使用DPU的機器學習應用程式:
Step 1: 啟動Xilinx SDK
執行以下命令以啟動Xilinx SDK GUI:
xsdk
當XSDK GUI打開時,瀏覽至<PROJ ROOT>/sdk_workspace的空白workspace

Step 2: 創建新的Application Project
按照以下步驟,創建新的Application Project:
-
點擊主選單 File 然後選擇 New Application Project
- 輸入以下參數:
- Name: resnet50
- OS Platform: Linux
- Processor Type: psu_cortexa53
- Language: C++
-
點擊 Next
-
選擇 Empty Application
- 點擊 Finish.

Step 3: Import Source Files and Model .elf Files
按照以下步驟,import source files和model .elfs檔案:
- 點擊主選單 File 然後 Import -> General -> Filesystem.
- 瀏覽至
<PROJ ROOT>/files/resnet50. - 點擊 OK.
- 選擇 main.cc
- 確定
Into Folder已經設為 resnet50/src. - 點擊 Finish, 以及允許覆寫
main.cc. - 依同樣的步驟 import DPU的 model
.elf,dpu_resnet50_0.elf
Note: 這個models是事先使用使用DNNDK編譯好的,並放在<PROJ ROOT>/files/resnet50/B1152_1.4.0,你可以直接使用.

Step 4: 更新 Application Build Settings
按照以下步驟,更新application build settings:
-
在resnet50 application滑鼠右鍵,然後選擇 C/C++ Build Settings.
-
在 C/C++ Build -> Environment, 加入SYSROOT變數以及指向sysroot的位置. 比如上面我產生出的sysroot路徑:
${workspace_loc}/../petalinux/images/linux/sdk/sysroots/aarch64-xilinx-linux

- 將 compiler和linker指向SYSROOT:
-
g++ linker settings:
Miscellaneous -> Linker Flags :
--sysroot=${SYSROOT}
-
g++ compiler settings:
Miscellaneous -> Other Flags:
--sysroot=${SYSROOT}
-
- 在 g++ linker libraries tab, 加入以下 libraries:
- n2cube
- dputils
- pthread
- opencv_core
- opencv_imgcodecs
-
opencv_highgui

-
在 g++ linker -> Miscellaneous, 加入 model
.elfs到 Other Objects. - 從
resnet50/src directory加入dpu_resnet50_0.elf注意: 您可以點擊Workspace以瀏覽至所需的對象,如下圖所示:


- 點擊 OK.
- 在 resnet50 application下按滑鼠右鍵,然後選擇 Build Project.
Step 5: 創建 Face Detection Application
執行下列步驟,建立face detection的應用程式
-
重覆Step 2流程,而Name為 face_detection,其餘一樣
-
重覆Step 3流程,加入source file為
/files/face_detection/face_detection.cc -
刪除
main.cc -
從
<PROJ ROOT>/files/face_detection/B1152_1.4.0加入dpu_densebox.elf -
設定SYSROOT環境變數
-
在comoiler中,指定SYSROOT路徑和設定linker miscellaneous
- 加入以下libraries:
- n2cube
- dputils
- opencv_core
- opencv_imgcodecs
- opencv_highgui
- opencv_imgproc
- opencv_videoio
- pthread

-
對g++ Linker Miscellaneous Other Objects,選擇
face_detection/src/dpu_densebox.elf -
點擊 OK
- 在face_detection application下,按滑鼠右鍵然後選擇Build Project
使用Ultra96 v2 board驗證
設定 Ultra96 v2
依照以下步驟,設定Ultra96 v2:
- 連接上 12V power supply.
- 連接上 AES-ACC-USB-JTAG board.
- 連接上 Camera 子卡到Ultra96 v2 (選項)
- 將 microUSB cable 連接到 AES-ACC-USB-JTAG 和 PC.
- 將第二條microUSB cable從Ultra96 v2 USB3.0 connector連接到PC以進行連網
- 使用miniDiSplay cable 連接Ultra96 v2和DisplayPort Monitor (選項)
- 連接一個 USB webcam 到其中一個 host USB ports (選項)
-
準備一個MicroSD card,並partition成FAT32

在Ultra96 v2上執行應用程式
接下來,我們將所有測試集圖像到Host PC上的SD card暫存目錄,然後再一次將所有檔案複製SD card 中。PROJ_ROOT目錄下有一個sdcard目錄內已包含測試集圖像,Face detection和resnet50三個目錄測試圖像位於/ sdcard / common / image500_640_480目錄中。
Step 1: 複製檔案至SD card
執行下列步驟,複製檔案至SD card:
- 複製
<PROJ ROOT>/petalinux/images/linux/image.ub及BOOT.BIN到sdcard目錄下. - 複製
<PROJ_ROOT>/sdk_workspace/resnet50/Debug/resnet50.elf到sdcard/resnet50目錄下. -
複製
<PROJ_ROOT>/sdk_workspace/face_detection/Debug/face_detection.elf到sdcard/face_detection目錄下.你可以用複製和貼上執行以下命令:
cd <PROJ ROOT>
cp petalinux/images/linux/image.ub sdcard
cp petalinux/images/linux/BOOT.BIN sdcard
cp sdk_workspace/resnet50/Debug/resnet50.elf sdcard/resnet50/
cp sdk_workspace/face_detection/Debug/face_detection.elf sdcard/face_detection/`
- 在Host PC上將
sdcard目錄上所有的檔案複製到microSD card.
Step 2: Boot the Ultra96
將micro SD card放置到Ultra96 v2 board,使用以下的帳號及密碼登入:
- username = root
- password = root
Step 3: 初始化顯示畫面
有兩種方法可以顯示人臉檢測應用程式的結果。您可以將帶有DisplayPort的螢幕直接連接到Ultra96 v2 board,也可以通過網絡將video streaming傳輸到連接的PC,透過x-windows顯示。
螢幕
執行以下命令:
v4l2-ctl --set-fmt-video=width=640,height=480,pixelformat=UYVY
export DISPLAY=:0.0
xrandr --output DP-1 --mode 800x600
xset s off -dpms
注意: 使用 xrandr 設定適合的解析度. 當解析度設為1920x1080時,執行應用程式時,螢幕會閃爍,此時Memory頻寬需求高,DPU吃掉比較多的memory以至於顯示閃爍,可以透過程式設定優先權解決.
透過網路連接到Host PC
有兩種方法可以通過網絡連接到Ultra96 v2 board:
-
USB Ethernet adapter
- 將 USB Ethernet adapter連接到 Ultra96 v2上USB Host ports,然後連接到Host PC上的網路孔.
-
USB 虛擬網路卡(RNDIS/Ethernet Gadget):
-
使用micro USB連接Host PC及Ultra96 v2 USB3.0 並在Host PC將 RNDIS enable.
-
開機後執行以下命令,開啟網路功能:
modprobe g_ether ifup usb0
-
透過SSH連接並使用X11 forwarding將顯示畫面轉換到Host PC上:
在Windows上,使用有提供X-server的SSH client軟體(例如[MobaXterm](https://mobaxterm.mobatek.net/))通過網絡連接到target board。 確定有enable X-server,以及正確設置DISPLAY環境變量。 啟動應用程序時,輸出將轉發回Host PC並顯示在另一個視窗上。
在Linux環境下(或是Windows命令列),可以使用以下命令:
- ssh -X root@[IP address of Ultra96].
Step 4: 執行 Resnet50
使用以下命令,變換目錄到resnet50並且執行應用程式
```
cd /media/card/resnet50
./resnet50.elf
```
執行結果:

Step 5: 執行 face detection
使用以下命令,變換目錄到face_detection並且執行應用程式
cd /media/card/face_detection
./face_detection.elf
這是直接拿camera照有人臉的照片,使用的是RGB camera演算法,沒有深度資料,所以無法分辦真實人臉還是照片:

注意: 如果你看到 “Open camera error!”, 試著重新插拔USB camera.如果還是無法識別, 那麼請從新開機, 兩種方法都不行時,那就更換一個USB camera